Humanity Influenced Visualization Design for Aerial Sensor-based Visualization of Environmental Factors
Room: 110
2023-10-23T03:00:00ZGMT-0600Change your timezone on the schedule page
2023-10-23T03:00:00Z
Abstract
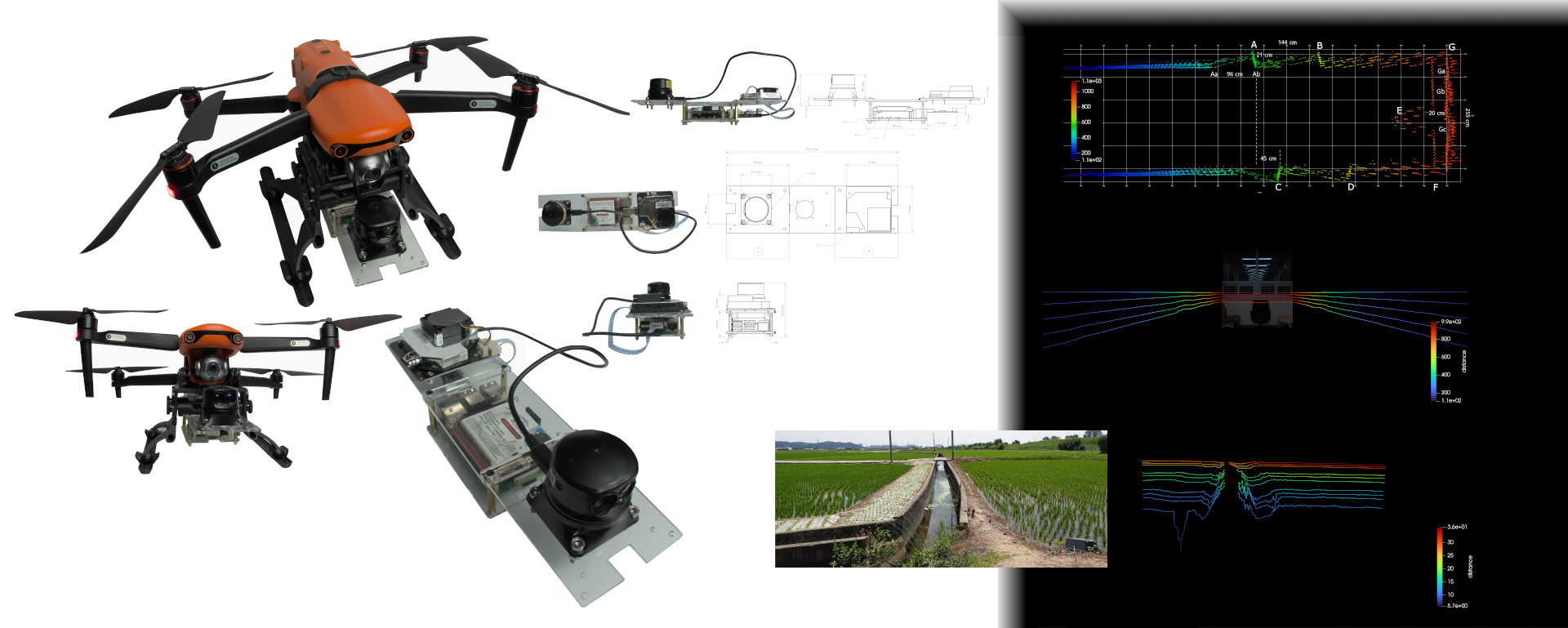
The motivating perspective of this work is that visualization is a human endeavor as natural as human life is itself. This has profound influence on the way visualization is approached as the focus shifts away from any data-centric, visualization technique- or system-based foundations to one of human-centric visual perception, information perception, information acquisition and learning. This paper reports on part of a design of a visualization approach and system for deployments in wide-scope application areas of interest and which is guided by the Engineering Insightful Serviceable Visualization (EISV) model and is thus in the context of this human-centric perspective. The application areas are primarily loosely constrained environments, that are, environments for which available techniques such as computational modeling or fixed, location-based sensors are ill-suited. These environments have terrain, build or other similar features. An aerial drone-based sensor platform is proposed to sample environmental data in these environments. One of the included sensors on this platform is a LiDAR, a distance ranging sensor. The visual output of the LiDAR is primarily studied in this paper using the notions of iconicity and indexicality in the Peircean sense and guided by the EISV model. Several work-in-progress experiments that illustrate how the proposed system may respond are described.